It is important to realise at this stage
that the system impulse response, ![]() , of a reflectometer is not
simply the input impulse response of the object on the output end of the
reflectometer; it includes the impulse response of the loudspeaker,
the losses in the source tube, the input pulse passing
the microphone on its way to the loudspeaker, the source reflections and so
on. The system impulse response,
, of a reflectometer is not
simply the input impulse response of the object on the output end of the
reflectometer; it includes the impulse response of the loudspeaker,
the losses in the source tube, the input pulse passing
the microphone on its way to the loudspeaker, the source reflections and so
on. The system impulse response, ![]() , that we have calculated can be chopped
to isolate the object reflections. These object reflections are equivalent to
those that can be measured by the
conventional pulse excitation except that our signal to noise ratio is much
improved. The deconvolution of object reflection and calibration pulse
measurements is still necessary when using MLS excitation.
, that we have calculated can be chopped
to isolate the object reflections. These object reflections are equivalent to
those that can be measured by the
conventional pulse excitation except that our signal to noise ratio is much
improved. The deconvolution of object reflection and calibration pulse
measurements is still necessary when using MLS excitation.
MLS signals are inherently periodic with a period of ![]() . In equation
(7.8) the system impulse response,
. In equation
(7.8) the system impulse response, ![]() , (which is not periodic)
is convolved with the
MLS signal,
, (which is not periodic)
is convolved with the
MLS signal, ![]() . The result is that
. The result is that ![]() is the periodic response of the system
to continuous excitation by the periodic MLS.
When we perform our experiments, we must choose an MLS signal
whose period time is larger than the total response time of the system
in order to prevent the end of our calculation of the system response folding
back onto
the start. Similarly, we must play the MLS signal end to end twice and ignore
the response during the first run through in order to make sure that the
response we are measuring conforms to the periodicity condition.
is the periodic response of the system
to continuous excitation by the periodic MLS.
When we perform our experiments, we must choose an MLS signal
whose period time is larger than the total response time of the system
in order to prevent the end of our calculation of the system response folding
back onto
the start. Similarly, we must play the MLS signal end to end twice and ignore
the response during the first run through in order to make sure that the
response we are measuring conforms to the periodicity condition.
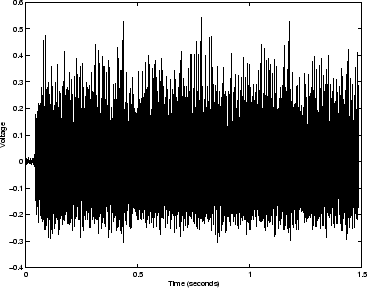
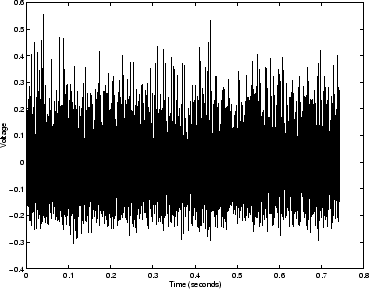
Figure 7.11 shows the signal recorded at the microphone when an MLS
signal of order ![]() is fed into the loudspeaker. The shorter reflectometer
with
is fed into the loudspeaker. The shorter reflectometer
with ![]() m and
m and ![]() m is used and data acquisition is
performed in Matlab for Windows with a Guillemot soundcard
at a sample rate of
m is used and data acquisition is
performed in Matlab for Windows with a Guillemot soundcard
at a sample rate of ![]() Hz. Sampling of the
microphone reflections is started and then the start of the MLS
signal is fed to the loudspeaker. The signal from the loudspeaker should take
Hz. Sampling of the
microphone reflections is started and then the start of the MLS
signal is fed to the loudspeaker. The signal from the loudspeaker should take
![]() s to reach the microphone.
In fact, the first 0.04 seconds of the recording consists only of undesired
background noise, showing that there is delay of 0.02 seconds between the
start of the sampling and the start of the MLS signal leaving the loudspeaker.
This delay is caused by computer processing time and means that care must
be taken when we are isolating the part of the system impulse response
corresponding to the object reflections or calibration pulse.
s to reach the microphone.
In fact, the first 0.04 seconds of the recording consists only of undesired
background noise, showing that there is delay of 0.02 seconds between the
start of the sampling and the start of the MLS signal leaving the loudspeaker.
This delay is caused by computer processing time and means that care must
be taken when we are isolating the part of the system impulse response
corresponding to the object reflections or calibration pulse.
The time period for a ![]() sequence is
sequence is
![]() s
which will also be the time length of our resulting measurement data for the
system impulse response.
This is considerably longer than the total time taken for an acoustic pulse
to decay to zero
as can be deduced from the fact that the pressure waves are much reduced
by losses and reflection from the loudspeaker after 0.1 seconds in say
figure 7.3. As mentioned previously, both
the MLS and measured response are assumed to be periodic by the theory.
Figure 7.11 shows the microphone pressure sampled
while two periods of the MLS are played by the loudspeaker, end to end.
The microphone signal during the second period therefore
features the response to the last part of the previous period of excitation
so satisfying the periodicity requirement. This signal is shown isolated in
figure 7.12.
s
which will also be the time length of our resulting measurement data for the
system impulse response.
This is considerably longer than the total time taken for an acoustic pulse
to decay to zero
as can be deduced from the fact that the pressure waves are much reduced
by losses and reflection from the loudspeaker after 0.1 seconds in say
figure 7.3. As mentioned previously, both
the MLS and measured response are assumed to be periodic by the theory.
Figure 7.11 shows the microphone pressure sampled
while two periods of the MLS are played by the loudspeaker, end to end.
The microphone signal during the second period therefore
features the response to the last part of the previous period of excitation
so satisfying the periodicity requirement. This signal is shown isolated in
figure 7.12.
 |
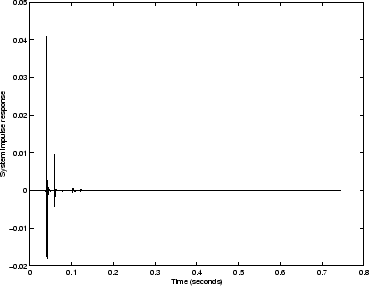
The auto-correlation of the MLS input and the recorded response from figure 7.12 was performed in the frequency domain using equation (7.14). Figure 7.13 shows the result. This is the full system impulse response and features the input pulse passing the microphone, the reflection of the pulse from the closed end of the source tube and the source reflections. The response shows that all acoustic energy decays to zero about 0.2 seconds after a pulse is produced as was expected.
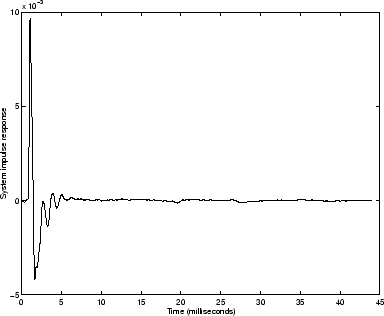
Figure 7.14 shows the calibration pulse or reflections from the closed end of the source tube obtained by chopping the system impulse response. The exact recorded time at which the calibration pulse arrives in the system impulse response depends on the time lag between the starting of sampling and the starting of the excitation as mentioned previously. This time lag depends on the software, hardware specifications and the computational load. In order to avoid this problem, the sample in the system impulse response with the maximum value (corresponding to the maximum of the input pulse) is first found. The position of the reflections from the closed end or test object can be defined relative to this point, meaning that the input/output time lag does not effect the results. This experiment can be repeated with a musical instrument or test object on the end of the source tube and analysed with the calibration pulse measurement to obtain the bore reconstruction and input impedance. By selecting appropriate delay times, the virtual dc tube and source reflection cancellation methods can be used.
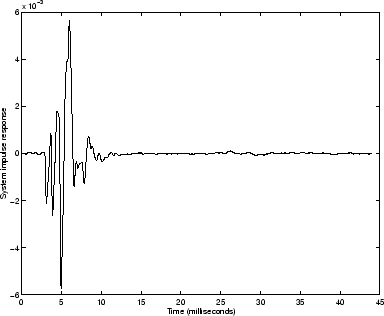
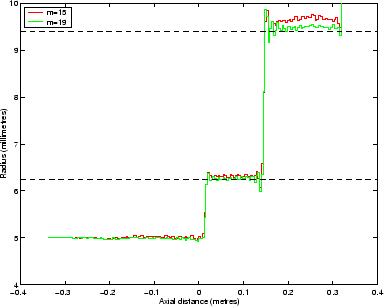
Figure 7.15 shows the object reflections obtained by chopping a
system impulse response measurement performed with the short stepped cylinder
test object used in chapter 5 on the end of the source
tube. As with the previous experiment
an MLS of order ![]() was used. The object reflections were
isolated from the system impulse response 2ms earlier than for
the calibration pulse, meaning that the virtual dc tube method can be applied.
was used. The object reflections were
isolated from the system impulse response 2ms earlier than for
the calibration pulse, meaning that the virtual dc tube method can be applied.
Figure 7.16 shows the resulting bore reconstruction with ![]() . Also
shown is the result of performing the experiment
with excitation with a much longer MLS signal of
. Also
shown is the result of performing the experiment
with excitation with a much longer MLS signal of ![]() . Such an MLS signal
will have a time length of
. Such an MLS signal
will have a time length of
![]() s. Calculating the
discrete Fourier transform of a signal this length takes several seconds with
the current computational power available. Using an increased order means
that more energy is added to the system, so improving the signal to
noise ratio. The bore reconstruction with
s. Calculating the
discrete Fourier transform of a signal this length takes several seconds with
the current computational power available. Using an increased order means
that more energy is added to the system, so improving the signal to
noise ratio. The bore reconstruction with ![]() measures the radius of the final cylindrical section to be 0.4 mm too large,
while the
measures the radius of the final cylindrical section to be 0.4 mm too large,
while the ![]() measurement is much improved, averaging just 0.1 mm more
than the correct value. The level of oscillations in supposedly cylindrical
sections of
bore are slightly reduced by the increase in order. This implies that the
noise level at high frequency is reduced by the fact that we have added more
energy to the system. The fact that the
measurement is much improved, averaging just 0.1 mm more
than the correct value. The level of oscillations in supposedly cylindrical
sections of
bore are slightly reduced by the increase in order. This implies that the
noise level at high frequency is reduced by the fact that we have added more
energy to the system. The fact that the ![]() reconstruction of the last
cylinder has an average value closer to the correct radius is
evidence of greater accuracy at low frequencies.
reconstruction of the last
cylinder has an average value closer to the correct radius is
evidence of greater accuracy at low frequencies.